Learning Goals 3 min
By the end of this lesson you will be able to:
- Build the Dual Gyro launcher with its Medium Motor in port A.
- Use [A v] set speed to (75) % to control how fast the motor spins.
- Launch two spinning tops fast enough to keep them spinning on the floor.
Meet the Model — the Dual Gyro 6 min
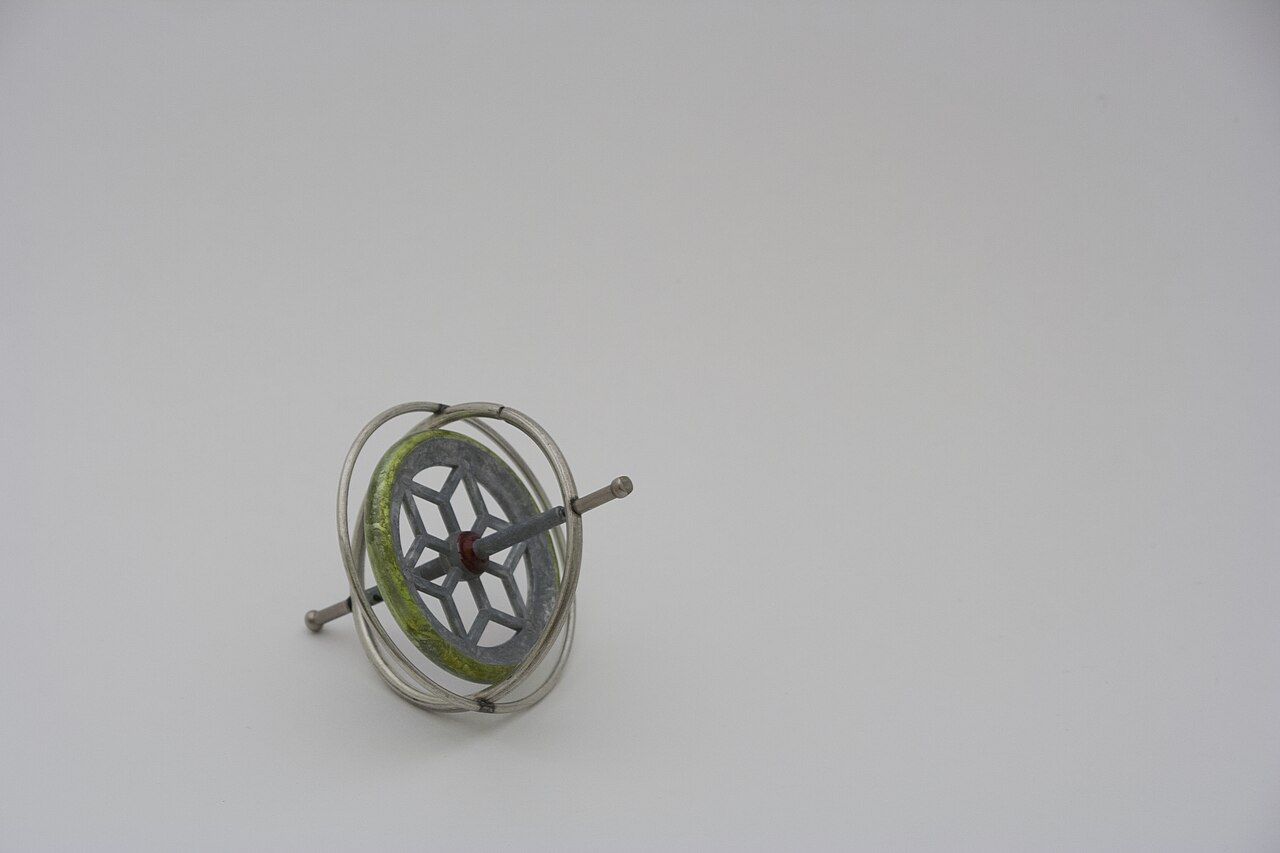
What is a gyroscope?
A gyroscope is a wheel spinning fast inside a frame of rings. Once it is spinning, it stubbornly holds its axis pointing the same way. Toy gyroscopes balance on a fingertip while they spin.
The science behind it
A fast-spinning wheel resists tilting. This is called angular momentum. Because of it, the wheel keeps a steady axis even when the frame is moved. That same effect lets a gyroscope sense turning, so it can tell which way something is rotating.
Where you meet it
Your phone and tablet use a tiny gyro sensor to know how you tilt them. Aircraft and ships use gyroscopes to stay on course. Spinning tops and a moving bicycle stay upright for the very same reason.
What we'll build
We'll build the Dual Gyro launcher. One Medium Motor on port A spins the gyro wheel. Then we program different speeds to see how a faster spin holds steadier.
Warm-Up 4 min
Last lesson you chose how far the motor turned. Today you choose how fast.
Quick-fire puzzle
Mei Ling runs this. Which spin is faster — the first or the second?
when program starts :: events hat [A v] set speed to (30) % :: motors [A v] run [clockwise v] for (3) [rotations v] :: motors [A v] set speed to (90) % :: motors [A v] run [clockwise v] for (3) [rotations v] :: motors
Reveal the answer
The second spin is faster. Both turn 3 rotations, but the speed was raised from 30% to 90% in between. Speed sets how quickly the turns happen; rotations set how many.
New Concept — motor speed 10 min
Speed is like the accelerator in a car. The number is a percentage from 0 to 100. 100% is full power; 0% is stopped.
Blocks reference
| Block | Category | What it does |
|---|---|---|
[A v] set speed to (75) % :: motors | Motors | Sets how fast the motor will spin. It does not start the motor — it sets the speed for the next motor block. |
[A v] run [clockwise v] for (3) [rotations v] :: motors | Motors | Spins the set number of rotations at the current speed. |
[A v] start motor [clockwise v] :: motors | Motors | Starts the motor at the current speed, until stopped. |
Speed is separate from distance
Set the speed before the motor block that should use it. The speed stays the same until you change it. Distance (rotations) and speed (per cent) are two different dials.
Why it matters
The Dual Gyro launcher copies a Beyblade arena. A slow spin barely launches the tops. A fast spin sends them spinning across the floor — like a real ripcord launcher.
Build & Program — the Dual Gyro 17 min
Part A — Build
Build the Dual Gyro launcher. A Medium Motor spins a launch axle that holds two tops side by side.
Components & ports: EV3 Brick · Medium Motor → port A.
- Attach the Medium Motor to the launcher frame; plug it into port A.
- Fit the launch axle onto the motor through a gear, so the motor spins it fast.
- Clip the two spinning-top slots onto the launch axle, side by side.
- Load a top into each slot, ready to launch.
Part B — Program
Set a high speed, then run a few rotations to launch both tops.
- Drag in the hat that starts the program:
when program starts :: events hat
- Set a high spin speed:
[A v] set speed to (90) % :: motors
- Run a few rotations to launch both tops:
[A v] run [clockwise v] for (4) [rotations v] :: motors
when program starts :: events hat [A v] set speed to (90) % :: motors [A v] run [clockwise v] for (4) [rotations v] :: motors
Expected behaviour: the launch axle whirls up to a high speed, runs four rotations, and stops — sending both spinning tops onto the floor still spinning.
Try It Yourself — three small builds 11 min
Goal: A gentle launch. Drop the speed to 40% and watch the tops barely spin.
when program starts :: events hat [A v] set speed to (40) % :: motors [A v] run [clockwise v] for (4) [rotations v] :: motors
Goal: Slow warm-up, fast launch. Spin gently first, then ramp to full speed.
when program starts :: events hat [A v] set speed to (30) % :: motors [A v] run [clockwise v] for (1) [rotations v] :: motors [A v] set speed to (100) % :: motors [A v] run [clockwise v] for (4) [rotations v] :: motors
Goal: Hafiz wants a countdown launcher: a 2-second pause, then a full-power launch on its own.
when program starts :: events hat wait (2) seconds [A v] set speed to (100) % :: motors [A v] run [clockwise v] for (5) [rotations v] :: motors
Mini-Challenge — find the launch speed 6 min
Combine today's [A v] set speed to (75) % with last lesson's rotations. Find the lowest speed that still launches both tops cleanly.
It works if:
- You test at least three different speeds.
- Both tops land spinning and stay upright for a moment.
Recap 2 min
You learned to control motor speed as a percentage. [A v] set speed to (75) % sets the dial; a run motor or start motor block then spins at that speed. Speed and rotations are two separate controls.
- set motor speed (block)
- Sets how fast a motor will spin, as a per cent from 0 to 100. Used before a run/start block.
- Speed (per cent)
- How fast the motor turns. 100% is full power, 0% is stopped.
Homework 1 min
Speed table. Launch at 50%, 75% and 100%. Write down how long each top keeps spinning on the floor.
Bring back next class: your three-row speed table.
Heads up for next class: EV3-L1-04 builds the Ferris Wheel and adds your first sound — a beep when the ride is ready.